Last year I wrote a post about cubicaltt on this blog. Since then there have been a lot of exciting developments in the world of cubes. In particular there are now two cubical proof assistants that are currently being developed in Gothenburg and Pittsburgh. One of them is a cubical version of Agda developed by Andrea Vezzosi at Chalmers and the other is a system called redtt developed by my colleagues at CMU.
These systems differ from cubicaltt in that they are proper proof assistants for cubical type theory in the sense that they support unification, interactive proof development via holes, etc… Cubical Agda inherits Agda’s powerful dependent pattern matching functionality, and redtt has a succinct notation for defining functions by eliminators. Our goal with cubicaltt was never to develop yet another proof assistant, but rather to explore how it could be to program and work in a core system based on cubical type theory. This meant that many things were quite tedious to do in cubicaltt, so it is great that we now have these more advanced systems that are much more pleasant to work in.
This post is about Cubical Agda, but more or less everything in it can also be done (with slight modifications) in redtt. This extension of Agda has actually been around for a few years now, however it is just this year that the theory of HITs has been properly worked out for cubical type theory:
On Higher Inductive Types in Cubical Type Theory
Inspired by this paper (which I will refer as “CHM”) Andrea has extended Cubical Agda with user definable HITs with definitional computation rules for all constructors. Working with these is a lot of fun and I have been doing many of the proofs in synthetic homotopy theory from the HoTT book cubically. Having a system with native support for HITs makes many things a lot easier and most of the proofs I have done are significantly shorter. However, this post will not focus on HITs, but rather on a core library for Cubical Agda that we have been developing over the last few months:
https://github.com/agda/cubical
The core part of this library has been designed with the aim to:
1. Expose and document the cubical primitives of Agda.
2. Provide an interface to HoTT as presented in the book (i.e. “Book HoTT”), but where everything is implemented with the cubical primitives under the hood.
The idea behind the second of these was suggested to me by Martín Escardó who wanted a file which exposes an identity type with the standard introduction principle and eliminator (satisfying the computation rule definitionally), together with function extensionality, univalence and propositional truncation. All of these notions should be represented using cubical primitives under the hood which means that they all compute and that there are no axioms involved. In particular this means that one can import this file in an Agda developments relying on Book HoTT and no axioms should then be needed; more about this later.
Our cubical library compiles with the latest development version of Agda and it is currently divided into 3 main parts:
Cubical.Basics
Cubical.Core
Cubical.HITs
The first of these contain various basic results from HoTT/UF, like isomorphisms are equivalences (i.e. have contractible fibers), Hedberg’s theorem (types with decidable equality are sets), various proofs of different formulations of univalence, etc. This part of the library is currently in flux as I’m adding a lot of results to it all the time.
The second one is the one I will focus on in this post and it is supposed to be quite stable by now. The files in this folder expose the cubical primitives and the cubical interface to HoTT/UF. Ideally a regular user should not have to look too closely at these files and instead just import Cubical.Core.Everything or Cubical.Core.HoTT-UF.
The third folder contains various HITs (S¹, S², S³, torus, suspension, pushouts, interval, join, smash products…) with some basic theory about these. I plan to write another post about this soon, so stay tuned.
As I said above a regular user should only really need to know about the Cubical.Core.Everything and Cubical.Core.HoTT-UF files in the core library. The Cubical.Core.Everything file exports the following things:
-- Basic primitives (some are from Agda.Primitive)
open import Cubical.Core.Primitives public
-- Basic cubical prelude
open import Cubical.Core.Prelude public
-- Definition of equivalences, Glue types and
-- the univalence theorem
open import Cubical.Core.Glue public
-- Propositional truncation defined as a
-- higher inductive type
open import Cubical.Core.PropositionalTruncation public
-- Definition of Identity types and definitions of J,
-- funExt, univalence and propositional truncation
-- using Id instead of Path
open import Cubical.Core.Id public
I will explain the contents of the Cubical.Core.HoTT-UF file in detail later in this post, but I would first like to clarify that it is absolutely not necessary to use that file as a new user. The point of it is mainly to provide a way to make already existing HoTT/UF developments in Agda compute, but I personally only use the cubical primitives provided by the Cubical.Core.Everything file when developing something new in Cubical Agda as I find these much more natural to work with (especially when reasoning about HITs).
Cubical Primitives
It is not my intention to write another detailed explanation of cubical type theory in this post; for that see my previous post and the paper (which is commonly referred to as “CCHM”, after the authors of CCHM):
Cubical Type Theory: a constructive interpretation of the univalence axiom
The main things that the CCHM cubical type theory extends dependent type theory with are:
- An interval pretype
- Kan operations
- Glue types
- Cubical identity types
The first of these is what lets us work directly with higher dimensional cubes in type theory and incorporating this into the judgmental structure is really what makes the system tick. The Cubical.Core.Primitives and Cubical.Core.Prelude files provide 1 and 2, together with some extra stuff that are needed to get 3 and 4 up and running.
Let’s first look at the cubical interval I. It has endpoints i0 : I and i1 : I together with connections and reversals:
_∧_ : I → I → I
_∨_ : I → I → I
~_ : I → I
satisfying the structure of a De Morgan algebra (as in CCHM). As Agda doesn’t have a notion of non-fibrant types (yet?) the interval I lives in Setω.
There are also (dependent) cubical Path types:
PathP : ∀ {ℓ} (A : I → Set ℓ) → A i0 → A i1 → Set ℓ
from which we can define non-dependent Paths:
Path : ∀ {ℓ} (A : Set ℓ) → A → A → Set ℓ
Path A a b = PathP (λ _ → A) a b
A non-dependent path Path A a b gets printed as a ≡ b. I would like to generalize this at some point and have cubical extension types (inspired by A type theory for synthetic ∞-categories). These extension types are already in redtt and has proved to be very natural and useful, especially for working with HITs as shown by this snippet of redtt code coming from the proof that the loop space of the circle is the integers:
def decode-square
: (n : int)
→ [i j] s1 [
| i=0 → loopn (pred n) j
| i=1 → loopn n j
| j=0 → base
| j=1 → loop i
]
= ...
Just like in cubicaltt we get short proofs of the basic primitives from HoTT/UF:
refl : ∀ {ℓ} {A : Set ℓ} (x : A) → x ≡ x
refl x = λ _ → x
sym : ∀ {ℓ} {A : Set ℓ} {x y : A} → x ≡ y → y ≡ x
sym p = λ i → p (~ i)
cong : ∀ {ℓ ℓ'} {A : Set ℓ} {B : A → Set ℓ'} {x y : A}
(f : (a : A) → B a)
(p : x ≡ y) →
PathP (λ i → B (p i)) (f x) (f y)
cong f p = λ i → f (p i)
funExt : ∀ {ℓ ℓ'} {A : Set ℓ} {B : A → Set ℓ'}
{f g : (x : A) → B x}
(p : (x : A) → f x ≡ g x) →
f ≡ g
funExt p i x = p x i
Note that the proof of functional extensionality is just swapping the arguments to p!
Partial elements and cubical subtypes
[In order for me to be able to explain the other features of Cubical Agda in some detail I have to spend some time on partial elements and cubical subtypes, but as these notions are quite technical I would recommend readers who are not already familiar with them to just skim over this section and read it more carefully later.]
One of the key operations in the cubical set model is to map an element of the interval to an element of the face lattice (i.e. the type of cofibrant propositions F ⊂ Ω). This map is written (_ = 1) : I → F in CCHM and in Cubical Agda it is written IsOne r. The constant 1=1 is a proof that (i1 = 1), i.e. of IsOne i1.
This lets us then work with partial types and elements directly (which was not possible in cubicaltt). The type Partial φ A is a special version of the function space IsOne φ → A with a more extensional judgmental equality. There is also a dependent version PartialP φ A which allows A to be defined only on φ. As these types are not necessarily fibrant they also live in Setω. These types are easiest to understand by seeing how one can introduce them:
sys : ∀ i → Partial (i ∨ ~ i) Set₁
sys i (i = i1) = Set → Set
sys i (i = i0) = Set
This defines a partial type in Set₁ which is defined when (i = i1) ∨ (i = i0). We define it by pattern matching so that it is Set → Set when (i = i1) and Set when (i = i0). Note that we are writing (i ∨ ~ i) and that the IsOne map is implicit. If one instead puts a hole as right hand side:
sys : ∀ i → Partial (i ∨ ~ i) Set₁
sys i x = {! x !}
and ask Agda what the type of x is (by putting the cursor in the hole and typing C-c C-,) then Agda answers:
Goal: Set₁
—————————————————————————————————————————————
x : IsOne (i ∨ ~ i)
i : I
I usually introduce these using pattern matching lambdas so that I can write:
sys' : ∀ i → Partial (i ∨ ~ i) Set₁
sys' i = \ { (i = i0) → Set
; (i = i1) → Set → Set }
This is very convenient when using the Kan operations. Furthermore, when the cases overlap they must of course agree:
sys2 : ∀ i j → Partial (i ∨ (i ∧ j)) Set₁
sys2 i j = \ { (i = i1) → Set
; (i = i1) (j = i1) → Set }
In order to get this to work Andrea had to adapt the pattern-matching of Agda to allow us to pattern-match on the faces like this. It is however not yet possible to use C-c C-c to automatically generate the cases for a partial element, but hopefully this will be added at some point.
Using the partial elements there are also cubical subtypes as in CCHM:
_[_↦_] : ∀ {ℓ} (A : Set ℓ) (φ : I) (u : Partial φ A) →
Agda.Primitive.Setω
A [ φ ↦ u ] = Sub A φ u
So that a : A [ φ ↦ u ] is a partial element a : A that agrees with u on φ. We have maps in and out of the subtypes:
inc : ∀ {ℓ} {A : Set ℓ} {φ} (u : A) →
A [ φ ↦ (λ _ → u) ]
ouc : ∀ {ℓ} {A : Set ℓ} {φ : I} {u : Partial φ A} →
A [ φ ↦ u ] → A
It would be very nice to have subtyping for these, but at the moment the user has to write inc/ouc explicitly. With this infrastructure we can now consider the Kan operations of cubical type theory.
Kan operations
In order to support HITs we use the Kan operations from CHM. The first of these is a generalized transport operation:
transp : ∀ {ℓ} (A : I → Set ℓ) (φ : I) (a : A i0) → A i1
When calling transp A φ a Agda makes sure that A is constant on φ and when calling this with i0 for φ we recover the regular transport function, furthermore when φ is i1 this is the identity function. Being able to control when transport is the identity function is really what makes this operation so useful (see the definition of comp below) and why we got HITs to work so nicely in CHM compared to CCHM.
We also have homogeneous composition operations:
hcomp : ∀ {ℓ} {A : Set ℓ} {φ : I}
(u : I → Partial A φ) (a : A) → A
When calling hcomp A φ u a Agda makes sure that a agrees with u i0 on φ. This is like the composition operations in CCHM, but the type A is constant. Note that this operation is actually different from the one in CHM as φ is in the interval and not the face lattice. By the way the partial elements are set up the faces will then be compared under the image of IsOne. This subtle detail is actually very useful and gives a very neat trick for eliminating empty systems from Cubical Agda (this has not yet been implemented, but it is discussed here).
Using these two operations we can derive the heterogeneous composition
operation:
comp : ∀ {ℓ : I → Level} (A : ∀ i → Set (ℓ i)) {φ : I}
(u : ∀ i → Partial φ (A i))
(u0 : A i0 [ φ ↦ u i0 ]) → A i1
comp A {φ = φ} u u0 =
hcomp
(λ i → λ { (φ = i1) →
transp (λ j → A (i ∨ j)) i (u _ 1=1) })
(transp A i0 (ouc u0))
This decomposition of the Kan operations into transport and homogeneous composition seems crucial to get HITs to work properly in cubical type theory and in fact redtt is also using a similar decomposition of their Kan operations.
We can also derive both homogeneous and heterogeneous Kan filling using hcomp and comp with connections:
hfill : ∀ {ℓ} {A : Set ℓ} {φ : I}
(u : ∀ i → Partial φ A)
(u0 : A [ φ ↦ u i0 ])
(i : I) → A
hfill {φ = φ} u u0 i =
hcomp (λ j → λ { (φ = i1) → u (i ∧ j) 1=1
; (i = i0) → ouc u0 })
(ouc u0)
fill : ∀ {ℓ : I → Level} (A : ∀ i → Set (ℓ i)) {φ : I}
(u : ∀ i → Partial φ (A i))
(u0 : A i0 [ φ ↦ u i0 ])
(i : I) → A i
fill A {φ = φ} u u0 i =
comp (λ j → A (i ∧ j))
(λ j → λ { (φ = i1) → u (i ∧ j) 1=1
; (i = i0) → ouc u0 })
(inc {φ = φ ∨ (~ i)} (ouc {φ = φ} u0))
Using these operations we can do all of the standard cubical stuff, like composing paths and defining J with its computation rule (up to a Path):
compPath : ∀ {ℓ} {A : Set ℓ} {x y z : A} →
x ≡ y → y ≡ z → x ≡ z
compPath {x = x} p q i =
hcomp (λ j → \ { (i = i0) → x
; (i = i1) → q j })
(p i)
module _ {ℓ ℓ'} {A : Set ℓ} {x : A}
(P : ∀ y → x ≡ y → Set ℓ') (d : P x refl) where
J : {y : A} → (p : x ≡ y) → P y p
J p = transp (λ i → P (p i) (λ j → p (i ∧ j))) i0 d
JRefl : J refl ≡ d
JRefl i = transp (λ _ → P x refl) i d
The use of a module here is not crucial in any way, it’s just an Agda trick to make J and JRefl share some arguments.
Glue types and univalence
The file Cubical.Core.Glue defines fibers and equivalences (as they were originally defined by Voevodsky in his Foundations library, i.e. as maps with contractible fibers). Using this we export the Glue types of Cubical Agda which lets us extend a total type by a partial family of equivalent types:
Glue : ∀ {ℓ ℓ'} (A : Set ℓ) {φ : I} →
(Te : Partial φ (Σ[ T ∈ Set ℓ' ] T ≃ A)) →
Set ℓ'
This comes with introduction and elimination forms (glue and unglue). With this we formalize the proof of a variation of univalence following the proof in Section 7.2 of CCHM. The key observation is that unglue is an equivalence:
unglueIsEquiv : ∀ {ℓ} (A : Set ℓ) (φ : I)
(f : PartialP φ (λ o → Σ[ T ∈ Set ℓ ] T ≃ A)) →
isEquiv {A = Glue A f} (unglue {φ = φ})
equiv-proof (unglueIsEquiv A φ f) = λ (b : A) →
let u : I → Partial φ A
u i = λ{ (φ = i1) → equivCtr (f 1=1 .snd) b .snd (~ i) }
ctr : fiber (unglue {φ = φ}) b
ctr = ( glue (λ { (φ = i1) → equivCtr (f 1=1 .snd) b .fst }) (hcomp u b)
, λ j → hfill u (inc b) (~ j))
in ( ctr
, λ (v : fiber (unglue {φ = φ}) b) i →
let u' : I → Partial (φ ∨ ~ i ∨ i) A
u' j = λ { (φ = i1) → equivCtrPath (f 1=1 .snd) b v i .snd (~ j)
; (i = i0) → hfill u (inc b) j
; (i = i1) → v .snd (~ j) }
in ( glue (λ { (φ = i1) → equivCtrPath (f 1=1 .snd) b v i .fst }) (hcomp u' b)
, λ j → hfill u' (inc b) (~ j)))
The details of this proof is best studied interactively in Agda and by first understanding the proof in CCHM. The reason this is a crucial observation is that it says that any partial family of equivalences can be extended to a total one from Glue [ φ ↦ (T,f) ] A to A:
unglueEquiv : ∀ {ℓ} (A : Set ℓ) (φ : I)
(f : PartialP φ (λ o → Σ[ T ∈ Set ℓ ] T ≃ A)) →
(Glue A f) ≃ A
unglueEquiv A φ f = ( unglue {φ = φ} , unglueIsEquiv A φ f )
and this is exactly what we need to prove the following formulation of the univalence theorem:
EquivContr : ∀ {ℓ} (A : Set ℓ) → isContr (Σ[ T ∈ Set ℓ ] T ≃ A)
EquivContr {ℓ} A =
( ( A , idEquiv A)
, λ w i →
let f : PartialP (~ i ∨ i) (λ x → Σ[ T ∈ Set ℓ ] T ≃ A)
f = λ { (i = i0) → ( A , idEquiv A ) ; (i = i1) → w }
in ( Glue A f , unglueEquiv A (~ i ∨ i) f) )
This formulation of univalence was proposed by Martín Escardó in (see also Theorem 5.8.4 of the HoTT Book):
https://groups.google.com/forum/#!msg/homotopytypetheory/HfCB_b-PNEU/Ibb48LvUMeUJ
We have also formalized a quite slick proof of the standard formulation of univalence from EquivContr (see Cubical.Basics.Univalence). This proof uses that EquivContr is contractibility of singletons for equivalences, which combined with subst can be used to prove equivalence induction:
contrSinglEquiv : ∀ {ℓ} {A B : Set ℓ} (e : A ≃ B) →
(B , idEquiv B) ≡ (A , e)
contrSinglEquiv {A = A} {B = B} e =
isContr→isProp (EquivContr B) (B , idEquiv B) (A , e)
EquivJ : ∀ {ℓ ℓ′} (P : (A B : Set ℓ) → (e : B ≃ A) → Set ℓ′)
(r : (A : Set ℓ) → P A A (idEquiv A))
(A B : Set ℓ) (e : B ≃ A) →
P A B e
EquivJ P r A B e =
subst (λ x → P A (x .fst) (x .snd))
(contrSinglEquiv e) (r A)
We then use that the Glue types also gives a map ua which maps the identity equivalence to refl:
ua : ∀ {ℓ} {A B : Set ℓ} → A ≃ B → A ≡ B
ua {A = A} {B = B} e i =
Glue B (λ { (i = i0) → (A , e)
; (i = i1) → (B , idEquiv B) })
uaIdEquiv : ∀ {ℓ} {A : Set ℓ} → ua (idEquiv A) ≡ refl
uaIdEquiv {A = A} i j =
Glue A {φ = i ∨ ~ j ∨ j} (λ _ → A , idEquiv A)
Now, given any function au : ∀ {ℓ} {A B : Set ℓ} → A ≡ B → A ≃ B satisfying auid : ∀ {ℓ} {A B : Set ℓ} → au refl ≡ idEquiv A we directly get that this is an equivalence using the fact that any isomorphism is an equivalence:
module Univalence
(au : ∀ {ℓ} {A B : Set ℓ} → A ≡ B → A ≃ B)
(auid : ∀ {ℓ} {A B : Set ℓ} → au refl ≡ idEquiv A) where
thm : ∀ {ℓ} {A B : Set ℓ} → isEquiv au
thm {A = A} {B = B} =
isoToIsEquiv {B = A ≃ B} au ua
(EquivJ (λ _ _ e → au (ua e) ≡ e)
(λ X → compPath (cong au uaIdEquiv)
(auid {B = B})) _ _)
(J (λ X p → ua (au p) ≡ p)
(compPath (cong ua (auid {B = B})) uaIdEquiv))
We can then instantiate this with for example the au map defined using J (which is how Vladimir originally stated the univalence axiom):
eqweqmap : ∀ {ℓ} {A B : Set ℓ} → A ≡ B → A ≃ B
eqweqmap {A = A} e = J (λ X _ → A ≃ X) (idEquiv A) e
eqweqmapid : ∀ {ℓ} {A : Set ℓ} → eqweqmap refl ≡ idEquiv A
eqweqmapid {A = A} = JRefl (λ X _ → A ≃ X) (idEquiv A)
univalenceStatement : ∀ {ℓ} {A B : Set ℓ} →
isEquiv (eqweqmap {ℓ} {A} {B})
univalenceStatement = Univalence.thm eqweqmap eqweqmapid
Note that eqweqmapid is not proved by refl, instead we need to use the fact that the computation rule for J holds up to a Path. Furthermore, I would like to emphasize that there is no problem with using J for Path’s and that the fact that the computation rule doesn’t hold definitionally is almost never a problem for practical formalization as one rarely use it as it is often more natural to just use the cubical primitives. However, in Section 9.1 of CCHM we solve this by defining cubical identity types satisfying the computation rule definitionally (following a trick of Andrew Swan).
Cubical identity types
The idea behind the cubical identity types is that an element of an identity type is a pair of a path and a formula which tells us where this path is constant, so for example reflexivity is just the constant path together with the fact that it is constant everywhere (note that the interval variable comes before the path as the path depends on it):
refl : ∀ {ℓ} {A : Set ℓ} {x : A} → Id x x
refl {x = x} = ⟨ i1 , (λ _ → x) ⟩
These types also come with an eliminator from which we can prove J such that it is the identity function on refl, i.e. where the computation rule holds definitionally (for details see the Agda code in Cubical.Core.Id). We then prove that Path and Id are equivalent types and develop the theory that we have for Path for Id as well, in particular we prove the univalence theorem expressed with Id everywhere (the usual formulation can be found in Cubical.Basics.UnivalenceId).
Note that the cubical identity types are not an inductive family like in HoTT which means that we cannot use Agda’s pattern-matching to match on them. Furthermore Cubical Agda doesn’t support inductive families yet, but it should be possible to adapt the techniques of Cavallo/Harper presented in
Higher Inductive Types in Cubical Computational Type Theory
in order to extend it with inductive families. The traditional identity types could then be defined as in HoTT and pattern-matching should work as expected.
Propositional truncation
The core library only contains one HIT: propositional truncation (Cubical.Core.PropositionalTruncation). As Cubical Agda has native support for user defined HITs this is very convenient to define:
data ∥_∥ {ℓ} (A : Set ℓ) : Set ℓ where
∣_∣ : A → ∥ A ∥
squash : ∀ (x y : ∥ A ∥) → x ≡ y
We can then prove the recursor (and eliminator) using pattern-matching:
recPropTrunc : ∀ {ℓ} {A : Set ℓ} {P : Set ℓ} →
isProp P → (A → P) → ∥ A ∥ → P
recPropTrunc Pprop f ∣ x ∣ = f x
recPropTrunc Pprop f (squash x y i) =
Pprop (recPropTrunc Pprop f x) (recPropTrunc Pprop f y) i
However I would not only use recPropTrunc explicitly as we can just use pattern-matching to define functions out of HITs. Note that the cubical machinery makes it possible for us to define these pattern-matching equations in a very nice way without any ap‘s. This is one of the main reasons why I find it a lot more natural to work with HITs in cubical type theory than in Book HoTT: the higher constructors of HITs construct actual elements of the HIT, not of its identity type!
This is just a short example of what can be done with HITs in Cubical Agda, I plan to write more about this in a future post, but for now one can look at the folder Cubical/HITs for many more examples (S¹, S², S³, torus, suspension, pushouts, interval, join, smash products…).
Constructive HoTT/UF
By combining everything I have said so far we have written the file Cubical.Core.HoTT-UF which exports the primitives of HoTT/UF defined using cubical machinery under the hood:
open import Cubical.Core.Id public
using ( _≡_ -- The identity type.
; refl -- Unfortunately, pattern matching on refl is not available.
; J -- Until it is, you have to use the induction principle J.
; transport -- As in the HoTT Book.
; ap
; _∙_
; _⁻¹
; _≡⟨_⟩_ -- Standard equational reasoning.
; _∎
; funExt -- Function extensionality
-- (can also be derived from univalence).
; Σ -- Sum type. Needed to define contractible types, equivalences
; _,_ -- and univalence.
; pr₁ -- The eta rule is available.
; pr₂
; isProp -- The usual notions of proposition, contractible type, set.
; isContr
; isSet
; isEquiv -- A map with contractible fibers
-- (Voevodsky's version of the notion).
; _≃_ -- The type of equivalences between two given types.
; EquivContr -- A formulation of univalence.
; ∥_∥ -- Propositional truncation.
; ∣_∣ -- Map into the propositional truncation.
; ∥∥-isProp -- A truncated type is a proposition.
; ∥∥-recursion -- Non-dependent elimination.
; ∥∥-induction -- Dependent elimination.
)
The idea is that if someone has some code written using HoTT/UF axioms in Agda they can just import this file and everything should compute properly. The only downside is that one has to rewrite all pattern-matches on Id to explicit uses of J, but if someone is willing to do this and have some cool examples that now compute please let me know!
That’s all I had to say about the library for now. Pull-requests and feedback on how to improve it are very welcome! Please use the Github page for the library for comments and issues:
https://github.com/agda/cubical/issues
If you find some bugs in Cubical Agda you can use the Github page of Agda to report them (just check that no-one has already reported the bug):
https://github.com/agda/agda/issues
 such that
such that  , as defined in
, as defined in  such that the image
such that the image  of
of  under the equivalence
under the equivalence  satisfies
satisfies  . This is all incredibly impressive, and, naturally, it’s great to see that we can actually rephrase so many classical results in HoTT. Undoubtedly, the argument shows why the equivalence
. This is all incredibly impressive, and, naturally, it’s great to see that we can actually rephrase so many classical results in HoTT. Undoubtedly, the argument shows why the equivalence  , but it doesn’t really tell us (explicitly) how this happens.
, but it doesn’t really tell us (explicitly) how this happens. .
.  — elements of other homotopy groups which the equivalence
— elements of other homotopy groups which the equivalence  under the equivalence in question. The neat thing here is that the sequence gives rise to a sequence of new definitions of the Brunerie number, in decreasing level of ‘complexity’. The numbers corresponding to
under the equivalence in question. The neat thing here is that the sequence gives rise to a sequence of new definitions of the Brunerie number, in decreasing level of ‘complexity’. The numbers corresponding to  and
and  are still too heavy for Cubical Agda to handle, but (an optimised version of)
are still too heavy for Cubical Agda to handle, but (an optimised version of)  normalises to
normalises to  . We define it using the standard
. We define it using the standard  construction:
construction:

 using the following constructors:
using the following constructors:


 using the following constructors:
using the following constructors:


 -fold suspension of
-fold suspension of  . We take
. We take  and higher spheres to be pointed by
and higher spheres to be pointed by  . Another type of interest,
. Another type of interest,  , will be taken to be pointed by
, will be taken to be pointed by  . Given a pointed type
. Given a pointed type  , we define its
, we define its  , i.e. the set truncated type of pointed functions from
, i.e. the set truncated type of pointed functions from  to
to  to denote addition on
to denote addition on  to denote inversion on arbitrary
to denote inversion on arbitrary  for the canonical function
for the canonical function  (where
(where 

 . In HoTT, we can define it by
. In HoTT, we can define it by  and
and 
 is suggestive – it satisfies most properties that you’d expect from a ‘cup product’ (in fact it induces a ‘true’ cup product via the map
is suggestive – it satisfies most properties that you’d expect from a ‘cup product’ (in fact it induces a ‘true’ cup product via the map  ). It satisfies the following properties, all provable by circle induction:
). It satisfies the following properties, all provable by circle induction:



 by
by


 via joins
via joins with a not so nice map, namely
with a not so nice map, namely  . However, what if we defined
. However, what if we defined  instead? Clearly, this definition is equivalent to the usual one by precomposition with
instead? Clearly, this definition is equivalent to the usual one by precomposition with  . This would allow us redefine the Brunerie map to be simply
. This would allow us redefine the Brunerie map to be simply  . Let’s make this happen.
. Let’s make this happen.
 , we get an induced map
, we get an induced map  defined by
defined by
 when
when  in
in  is induced by the composition
is induced by the composition  .
. -connected) to show that
-connected) to show that  . This is the key to understanding
. This is the key to understanding  . In the first 3 chapters of Brunerie’s thesis, he shows that
. In the first 3 chapters of Brunerie’s thesis, he shows that  where
where  and where
and where  . It’s probably time to define
. It’s probably time to define 


 .
. ,
,  as a composition of 4 group isomorphisms
as a composition of 4 group isomorphisms  and simultaneously tracing
and simultaneously tracing 

 — it comes from the long exact sequence of homotopy groups induced from the Hopf fibration. Fortunately, however, its inverse is easy to describe: it is simply postcomposition with the Hopf map
— it comes from the long exact sequence of homotopy groups induced from the Hopf fibration. Fortunately, however, its inverse is easy to describe: it is simply postcomposition with the Hopf map  . The Hopf map is defined as follows:
. The Hopf map is defined as follows: 


 such that
such that  . It is defined as follows:
. It is defined as follows:


 . For this, we need to show that
. For this, we need to show that  . I won’t do this here, but the proof is very direct. The idea is that the terms in the
. I won’t do this here, but the proof is very direct. The idea is that the terms in the  -case are chosen precisely to take care of the
-case are chosen precisely to take care of the  appearing in the definition of the Hopf map.
appearing in the definition of the Hopf map.
 is defined by postcomposition with
is defined by postcomposition with  . It is defined by
. It is defined by


 . To prove this, we need to show that
. To prove this, we need to show that  . Let’s consider the definition of
. Let’s consider the definition of  (modulo some light rewriting):
(modulo some light rewriting):


 .
.
 is straightforward. I won’t do this here, but the idea is that by following
is straightforward. I won’t do this here, but the idea is that by following  under
under  , we see that
, we see that  . In fact, we can also show that (a slight rephrasing of)
. In fact, we can also show that (a slight rephrasing of)  is
is  .
. . However, it is enough to show that
. However, it is enough to show that , then
, then  -torsion in
-torsion in  . It is defined by
. It is defined by


 . In other words, if we could flip the two path components in the definition of
. In other words, if we could flip the two path components in the definition of  . Naturally, this is not possible. But what happens if we suspend the situation?
. Naturally, this is not possible. But what happens if we suspend the situation? induces a surjection
induces a surjection  . We can easily show that
. We can easily show that  : for point constructors it holds definitionally and for the
: for point constructors it holds definitionally and for the 
 , and thus the Eckmann-Hilton argument applies, making the above equation hold. So the surjection
, and thus the Eckmann-Hilton argument applies, making the above equation hold. So the surjection  takes
takes  in the formalisation — sorry!). I suspect that the argument shouldn’t be much harder to formalise in standard Agda or Coq.
in the formalisation — sorry!). I suspect that the argument shouldn’t be much harder to formalise in standard Agda or Coq.
 , the
, the  -topos theory and in HoTT/UF, where in the latter a truth value is a type with at most one element, also known as a proposition (and sometimes as an h-proposition or as a mere proposition).
-topos theory and in HoTT/UF, where in the latter a truth value is a type with at most one element, also known as a proposition (and sometimes as an h-proposition or as a mere proposition). is an involution, that is,
is an involution, that is,  .
. on
on  for every
for every 
 ,
,  , or any element of
, or any element of  .
.




 .
. by propositional extensionality (or univalence for propositions, in the case of HoTT/UF).
by propositional extensionality (or univalence for propositions, in the case of HoTT/UF). , and
, and
 and
and ![[0,1]](https://s0.wp.com/latex.php?latex=%5B0%2C1%5D&bg=ffffff&fg=333333&s=0&c=20201002) are order-embedded into each other, but they are not order isomorphic.
are order-embedded into each other, but they are not order isomorphic. is an injection if and only if it is left-cancellable, in the sense that
is an injection if and only if it is left-cancellable, in the sense that  implies
implies  . But, for types
. But, for types  and
and  that are not sets, this notion is too weak, and, moreover, is not a proposition as the identity type
that are not sets, this notion is too weak, and, moreover, is not a proposition as the identity type  has multiple elements in general. The appropriate notion of embedding for a function
has multiple elements in general. The appropriate notion of embedding for a function  is an equivalence for any
is an equivalence for any  .
. that picks a point
that picks a point  is left-cancellable, but it is an embedding if and only if the point
is left-cancellable, but it is an embedding if and only if the point  is homotopy isolated, which amounts to saying that the identity type
is homotopy isolated, which amounts to saying that the identity type  is contractible. This fails, for instance, when the type
is contractible. This fails, for instance, when the type  be embeddings of arbitrary types
be embeddings of arbitrary types  is a
is a  and
and  with
with  , the
, the  is inhabited. Using function extensionality and the assumption that
is inhabited. Using function extensionality and the assumption that  and
and  , we see that if
, we see that if  is a
is a  of
of  . In particular if
. In particular if  is a
is a  , and because
, and because  .
. by
by  if
if  , otherwise.
, otherwise.  is left-cancellable and split-surjective, as any such map is an equivalence.
is left-cancellable and split-surjective, as any such map is an equivalence. be a
be a  . Then
. Then  . Now, because if
. Now, because if  were a
were a  is an
is an  of the
of the  in the
in the  . By the axioms of differential cohesion, it has a left and a right adjoint and is idempotent. These properties are more than enough to model a monadic modality in homotopy type theory. Monadic modalities were already defined at the end of section 7 in the HoTT-Book and named just “modalities” and it is possible to have a homotopy type theory with a monadic modality just by adding some axioms — which is known not to work for non-trivial comonadic modalities.
. By the axioms of differential cohesion, it has a left and a right adjoint and is idempotent. These properties are more than enough to model a monadic modality in homotopy type theory. Monadic modalities were already defined at the end of section 7 in the HoTT-Book and named just “modalities” and it is possible to have a homotopy type theory with a monadic modality just by adding some axioms — which is known not to work for non-trivial comonadic modalities. and a unit
and a unit
 on some type
on some type  are equivalences for all
are equivalences for all 
 . This makes sense if we think of some very special interpretations of
. This makes sense if we think of some very special interpretations of  is given as the quotient map from a space
is given as the quotient map from a space  by a relation that identifies infinitesimally close points in
by a relation that identifies infinitesimally close points in  being infinitesimally close, denoted “
being infinitesimally close, denoted “ ” in terms of the units:
” in terms of the units:
 ” denotes the identity type (of
” denotes the identity type (of  :
:
 preserves inifinitesimal closeness, i.e.
preserves inifinitesimal closeness, i.e.


 are also equivalences. The latter corresponds to the fact that the differential of a diffeomorphism is invertible.
are also equivalences. The latter corresponds to the fact that the differential of a diffeomorphism is invertible. are a family of equivalences that consistently identify
are a family of equivalences that consistently identify  with all other formal disks
with all other formal disks  .
.
 .
. -types, identity types, “large”
-types, identity types, “large”  -types over an impredicative universe
-types over an impredicative universe  and function extensionality. Having large
and function extensionality. Having large  and a type family
and a type family  , we may form the dependent function type
, we may form the dependent function type
 (or alternatively over the subtype of
(or alternatively over the subtype of 
 is given by
is given by
 -algebras:
-algebras:
 and
and  :
:
 .
. and moreover let
and moreover let  be the forgetful functor to
be the forgetful functor to  be the covariant Yoneda embedding. We reason as follows:
be the covariant Yoneda embedding. We reason as follows:
 is defined as a limit, we obtain an algebra structure
is defined as a limit, we obtain an algebra structure  . As
. As  is guaranteed to be initial in
is guaranteed to be initial in 


 . Impredicativity is crucial for this: it guarantees that the product over
. Impredicativity is crucial for this: it guarantees that the product over  ! We won’t pursue this remarkable fact here, but only consider the case at hand, where the functor
! We won’t pursue this remarkable fact here, but only consider the case at hand, where the functor  becomes our definition of the type of natural numbers (so let us rename
becomes our definition of the type of natural numbers (so let us rename  for the remainder). Observe that this encoding can be seen as a subtype of (a translation of) the System F encoding given at the start. Indeed, the indexing object
for the remainder). Observe that this encoding can be seen as a subtype of (a translation of) the System F encoding given at the start. Indeed, the indexing object  of
of  , by
, by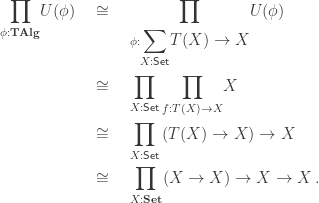

 , given any
, given any  and
and  . In other words, the introduction rules hold, and we can eliminate into other sets. Further, the
. In other words, the introduction rules hold, and we can eliminate into other sets. Further, the  such that:
such that:
 . Then
. Then

 with fixed endpoints.
with fixed endpoints. is a class function, assigning to any set
is a class function, assigning to any set  , then the image of any set
, then the image of any set  is again a set. In homotopy type theory we consider instead a map
is again a set. In homotopy type theory we consider instead a map  from a small type
from a small type  into a locally small type
into a locally small type  with the universal property of the image of
with the universal property of the image of  , and let
, and let  be a type with
be a type with  . Then the following are equivalent.
. Then the following are equivalent. is contractible.
is contractible. defined by path induction, mapping
defined by path induction, mapping  to
to  , is a fiberwise equivalence.
, is a fiberwise equivalence. . In other words,
. In other words,  is in the connected component of the type family
is in the connected component of the type family  .
. and an equivalence
and an equivalence  .
. , and the canonical dependent function
, and the canonical dependent function  defined by path induction by sending
defined by path induction by sending  to
to  is an equivalence.
is an equivalence. , while the equivalences in the second structure are canonical with respect to the choice of reflexivity
, while the equivalences in the second structure are canonical with respect to the choice of reflexivity  is contractible. Thus we see by Licata’s theorem that the canoncial fiberwise map is a fiberwise equivalence. Furthermore, it is not hard to see that the family of equivalences
is contractible. Thus we see by Licata’s theorem that the canoncial fiberwise map is a fiberwise equivalence. Furthermore, it is not hard to see that the family of equivalences  is equal to the canonical family of equivalences. There is slightly more to show, but let us keep up the pace and go on.
is equal to the canonical family of equivalences. There is slightly more to show, but let us keep up the pace and go on. is locally small. Observe also that the univalence axiom follows if we assume the `uncanonical univalence axiom’, namely that there merely exists a family of equivalences
is locally small. Observe also that the univalence axiom follows if we assume the `uncanonical univalence axiom’, namely that there merely exists a family of equivalences  . Thus we see that the slogan ‘identity of the universe is equivalent to equivalence’ actually implies univalence.
. Thus we see that the slogan ‘identity of the universe is equivalent to equivalence’ actually implies univalence. . Then we can construct
. Then we can construct ,
,
 is an embedding that satisfies the universal property of the image inclusion, namely that for any embedding
is an embedding that satisfies the universal property of the image inclusion, namely that for any embedding  for the mere proposition that
for the mere proposition that 
 is defined by first pulling back, and then taking the pushout, as indicated in the following diagram
is defined by first pulling back, and then taking the pushout, as indicated in the following diagram
 , the type
, the type  is equivalent to the usual join of types
is equivalent to the usual join of types  . Just like the join of types, the join of maps with a common codomain is associative, commutative, and it has a unit: the unique map from the empty type into
. Just like the join of types, the join of maps with a common codomain is associative, commutative, and it has a unit: the unique map from the empty type into  in the slice category over
in the slice category over  on any univalent universe that is closed under pushouts. Other applications include the construction of set-quotients and of Rezk-completion, since these are both constructed as the image of the Yoneda-embedding, and it also follows that the univalent completion of any dependent type
on any univalent universe that is closed under pushouts. Other applications include the construction of set-quotients and of Rezk-completion, since these are both constructed as the image of the Yoneda-embedding, and it also follows that the univalent completion of any dependent type  can be constructed as a type in
can be constructed as a type in  , without needing to resort to more exotic higher inductive types. In particular, any connected component of the universe is equivalent to a small type.
, without needing to resort to more exotic higher inductive types. In particular, any connected component of the universe is equivalent to a small type. ,
, 
 is n-truncated and satisfies the (dependent) universal property of n-truncation, namely that for every type family
is n-truncated and satisfies the (dependent) universal property of n-truncation, namely that for every type family  of possibly large types such that each
of possibly large types such that each  is n-truncated, the canonical map
is n-truncated, the canonical map
 is an equivalence.
is an equivalence. is trivial (take
is trivial (take  ). For the induction hypothesis we assume an n-truncation operation with structure described in the statement of the theorem.
). For the induction hypothesis we assume an n-truncation operation with structure described in the statement of the theorem. by
by  . As we have seen, the universe is locally small, and therefore the type
. As we have seen, the universe is locally small, and therefore the type  is locally small. Therefore we can define
is locally small. Therefore we can define
 .
. is indeed
is indeed  -truncated, and satisfies the universal property of the n-truncation we refer to the article.
-truncated, and satisfies the universal property of the n-truncation we refer to the article. of polymorphic endomaps is the polymorphic identity
of polymorphic endomaps is the polymorphic identity  .
. is the flip map on the type of booleans, then excluded middle holds. In the paper on arXiv, we have a stronger result:
is the flip map on the type of booleans, then excluded middle holds. In the paper on arXiv, we have a stronger result: if and only if excluded middle holds.
if and only if excluded middle holds. and types
and types  and points
and points  with
with  if and only if weak excluded middle holds.
if and only if weak excluded middle holds. , and otherwise we map
, and otherwise we map  for any proposition, so this is an automorphism.
for any proposition, so this is an automorphism. with the unit type
with the unit type  and leaves all other types unchanged. More generally, assuming excluded middle we can swap any two types with equivalent automorphism ∞-groups, since in that case the corresponding connected components of the universe are equivalent. Still more generally, we can permute arbitrarily any family of types all having the same automorphism ∞-group.
and leaves all other types unchanged. More generally, assuming excluded middle we can swap any two types with equivalent automorphism ∞-groups, since in that case the corresponding connected components of the universe are equivalent. Still more generally, we can permute arbitrarily any family of types all having the same automorphism ∞-group. is a group that is a set (i.e. a 1-group), then its Eilenberg-Mac Lane space
is a group that is a set (i.e. a 1-group), then its Eilenberg-Mac Lane space  is a 1-type, and its automorphism ∞-group is a 1-type whose
is a 1-type, and its automorphism ∞-group is a 1-type whose  is the outer automorphisms of
is the outer automorphisms of  is the center of
is the center of  is rigid. Such groups are not uncommon, including for instance the symmetric group
is rigid. Such groups are not uncommon, including for instance the symmetric group  for any
for any  . Thus, assuming excluded middle we can permute these
. Thus, assuming excluded middle we can permute these  arbitrarily, producing uncountably many automorphisms of the universe.
arbitrarily, producing uncountably many automorphisms of the universe. of the universe with
of the universe with  , then the double negation
, then the double negation
 such that
such that  for a particular
for a particular  you get a non-provable consequence of excluded middle, then you get
you get a non-provable consequence of excluded middle, then you get  -many beers, where
-many beers, where  we have
we have  . Suppose
. Suppose  with
with  , then
, then  . For suppose that
. For suppose that  , and hence
, and hence  . So by the corollary, we obtain
. So by the corollary, we obtain  . But
. But  implies
implies  , where
, where  is the groupoid of finite sets and bijections, and
is the groupoid of finite sets and bijections, and  is the category of finite sets and (total) functions. Intuitively, we can think of a species as mapping finite sets of “labels” to finite sets of “structures” built from those labels. For example, the species of linear orderings (i.e. lists) maps the finite set of labels
is the category of finite sets and (total) functions. Intuitively, we can think of a species as mapping finite sets of “labels” to finite sets of “structures” built from those labels. For example, the species of linear orderings (i.e. lists) maps the finite set of labels  to the size-
to the size- set of all possible linear orderings of those labels. Functoriality ensures that the specific identity of the labels does not matter—we can always coherently relabel things.
set of all possible linear orderings of those labels. Functoriality ensures that the specific identity of the labels does not matter—we can always coherently relabel things. can be represented by functions
can be represented by functions  , that is, each natural number maps to some coefficient in
, that is, each natural number maps to some coefficient in  ,
,
 . The only bijection which is allowed is the one which sends each element related to
. The only bijection which is allowed is the one which sends each element related to  to the other element related to
to the other element related to  .
.
 instead of
instead of  .) A few observations:
.) A few observations: . Intuitively, this is because if a set is finite, there is only one possible size it can have, so the evidence that it has that size is actually a mere proposition.
. Intuitively, this is because if a set is finite, there is only one possible size it can have, so the evidence that it has that size is actually a mere proposition. , since this reveals something about the underlying bijection; but we can write a function which finds the smallest value of
, since this reveals something about the underlying bijection; but we can write a function which finds the smallest value of  itself is a 1-type.
itself is a 1-type. is really just a path
is really just a path  between 0-types, that is, a bijection, since
between 0-types, that is, a bijection, since  trivially.
trivially. . The main reason I think this is the Right Definition ™ of species in HoTT is that functoriality comes for free! When defining species in set theory, one must say “a species is a functor, i.e. a pair of mappings satisfying such-and-such properties”. When constructing a particular species one must explicitly demonstrate the functoriality properties; since the mappings are just functions on sets, it is quite possible to write down mappings which are not functorial. But in HoTT, all functions are functorial with respect to paths, and we are using paths to represent the morphisms in
. The main reason I think this is the Right Definition ™ of species in HoTT is that functoriality comes for free! When defining species in set theory, one must say “a species is a functor, i.e. a pair of mappings satisfying such-and-such properties”. When constructing a particular species one must explicitly demonstrate the functoriality properties; since the mappings are just functions on sets, it is quite possible to write down mappings which are not functorial. But in HoTT, all functions are functorial with respect to paths, and we are using paths to represent the morphisms in  is a groupoid,
is a groupoid,  a category, and
a category, and  , then
, then  . In set theory, this coend would be a quotient of the corresponding
. In set theory, this coend would be a quotient of the corresponding  such that
such that  is a non-identity function
is a non-identity function  I have proved the converse of this. Like in exercise 6.9, we assume univalence.
I have proved the converse of this. Like in exercise 6.9, we assume univalence. ?
? (Notice that the proof of this is not quite as trivial as it may seem: LEM only gives us
(Notice that the proof of this is not quite as trivial as it may seem: LEM only gives us  if
if  does not work, because this is not necessarily a proposition.)
does not work, because this is not necessarily a proposition.) with
with  then LEM holds.
then LEM holds. we can find an explicit boolean
we can find an explicit boolean  such that
such that  Without loss of generality, we can assume
Without loss of generality, we can assume 
 to prove LEM.
to prove LEM.
 and it can be defined as
and it can be defined as  where
where  is the suspension of
is the suspension of  and also
and also 
 (not
(not  itself!). Now the proof continues by defining
itself!). Now the proof continues by defining
 is the equivalence given by the identity function on
is the equivalence given by the identity function on  ) and doing case analysis on
) and doing case analysis on  and if necessary also on
and if necessary also on  for some elements
for some elements  I do not believe it is very instructive to spell out all cases explicitly here. I wrote a more
I do not believe it is very instructive to spell out all cases explicitly here. I wrote a more  In particular, we do not require decidable equality of
In particular, we do not require decidable equality of  Assume
Assume  then by transporting along an appropriate equivalence (namely the one that identifies
then by transporting along an appropriate equivalence (namely the one that identifies  with
with  we get
we get  But since
But since  is a fixed point,
is a fixed point,  which is a contradiction.
which is a contradiction. we can construct a diagram
we can construct a diagram
 is defined by:
is defined by: is defined recursively from
is defined recursively from  . We call this diagram the iterated kernel pair of
. We call this diagram the iterated kernel pair of  . The result is that the colimit of this diagram is
. The result is that the colimit of this diagram is  , the image of
, the image of  is
is  the homotopy fiber of
the homotopy fiber of  (where
(where  is
is  the one-step truncation of
the one-step truncation of  the truncation of
the truncation of  is the circle. We try to address this issue considering an HIT that take care of already existing paths:
is the circle. We try to address this issue considering an HIT that take care of already existing paths: and the Čech nerve of a function. We outline this in the
and the Čech nerve of a function. We outline this in the  .
. :
: be a cocone into
be a cocone into  . Then we can extend
. Then we can extend  to a cocone into
to a cocone into  by postcomposition with
by postcomposition with 
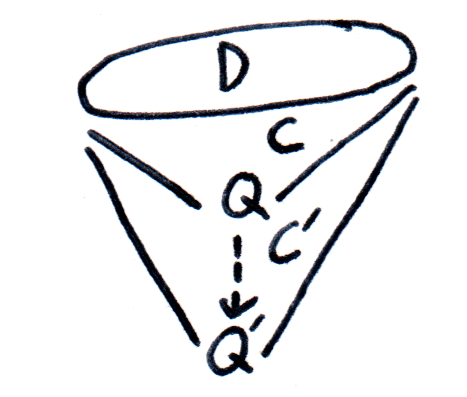
 over the same diagram,
over the same diagram,  if there exists a universal cocone over
if there exists a universal cocone over  is a colimit of
is a colimit of  be two diagrams over the same graph
be two diagrams over the same graph  is an equivalence of diagrams if all functions
is an equivalence of diagrams if all functions  are equivalences. In that case, we can define the inverse of
are equivalences. In that case, we can define the inverse of  , we can make every cocone over
, we can make every cocone over 



 given by
given by  is well an inverse of
is well an inverse of  .
. we get:
we get: and
and  be two colimits of the same diagram, then:
be two colimits of the same diagram, then:  .
. be a type and, for all
be a type and, for all  ,
,  a diagram over a graph
a diagram over a graph  and functions
and functions  are induced by the identity on the first component and by
are induced by the identity on the first component and by  on the second one. Let’s note
on the second one. Let’s note  this diagram.
this diagram. , we can make a cocone over
, we can make a cocone over  .
.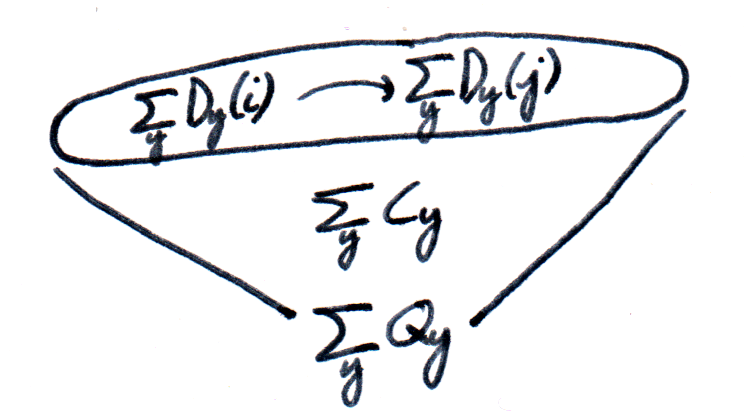
 ,
,  is a colimit of
is a colimit of  , then
, then  is not strong enough. But we have the following result:
is not strong enough. But we have the following result:
 (we will recover the theorem considering the unique function
(we will recover the theorem considering the unique function  ).
). the colimit of the kernel pair of
the colimit of the kernel pair of 
 is given by
is given by  .
.
 by universality (another point of view is to say that
by universality (another point of view is to say that  is defined by
is defined by  ).
).
 and
and  .
. , the image of
, the image of 
 (for
(for  ) at each type. Going from the second to the third is more involved, we don’t detail it here. And
) at each type. Going from the second to the third is more involved, we don’t detail it here. And  is the colimit of the diagram
is the colimit of the diagram
 (which is
(which is  (♣)
(♣) .
. then
then  and
and  are not equal. But now they become equal: by path induction we bring back to
are not equal. But now they become equal: by path induction we bring back to  . That is, if two elements are already equal, we don’t add any path between them.
. That is, if two elements are already equal, we don’t add any path between them. is
is  is an equivalence for all
is an equivalence for all  ) then so is
) then so is  . In particular, if
. In particular, if  (meaning that the one-step truncation of an hProp is now itself).
(meaning that the one-step truncation of an hProp is now itself).

 could be the colimit of the (n+1)-truncated Čech nerve. We are far from having such a proof but we succeeded in proving :
could be the colimit of the (n+1)-truncated Čech nerve. We are far from having such a proof but we succeeded in proving : is the colimit of the kernel pair (♣),
is the colimit of the kernel pair (♣),
 doesn’t have such a compatibility: if
doesn’t have such a compatibility: if  and
and  , in general we do not have
, in general we do not have in
in  .
. in
in  .
. because
because  is
is  .)
.) , and I want to write this blog post in case someone could not attend the talk but is interested nevertheless. There are also
, and I want to write this blog post in case someone could not attend the talk but is interested nevertheless. There are also  ?
?
 -limits (“infinite
-limits (“infinite  as the type of natural transformations between type-valued presheaves. If the type theory has propositional truncations, we can construct a canonical map from
as the type of natural transformations between type-valued presheaves. If the type theory has propositional truncations, we can construct a canonical map from  and
and  .
. ? If we think of elements of
? If we think of elements of  as anonymous inhabitants of
as anonymous inhabitants of  which “cannot look at its input”. But then, how can we specify what it means to “not look at its input” internally? A first attempt could be requesting that
which “cannot look at its input”. But then, how can we specify what it means to “not look at its input” internally? A first attempt could be requesting that  . Indeed, it has been shown:
. Indeed, it has been shown: , where the function from left to right is the canonical one.
, where the function from left to right is the canonical one.  , we can try to fix the problem that the paths given by
, we can try to fix the problem that the paths given by  “do not fit together” by throwing in a coherence proof, i.e. an element of
“do not fit together” by throwing in a coherence proof, i.e. an element of  . We should already know that this will introduce its own problems and thus not fix everything, but at least, we get:
. We should already know that this will introduce its own problems and thus not fix everything, but at least, we get: , again given by a canonical map from left to right.
, again given by a canonical map from left to right.  . The type
. The type 










 .
. . By going through the construction step-by-step, we see that the function part of the equivalence (map from left to right) is the canonical one (let’s write
. By going through the construction step-by-step, we see that the function part of the equivalence (map from left to right) is the canonical one (let’s write  ), mapping
), mapping  to the triple
to the triple  . Before we have started the construction, we have assumed a point
. Before we have started the construction, we have assumed a point  ! So, if the assumption
! So, if the assumption  . We can move the
. We can move the  -part to both sides of the equivalence, and on the right-hand side, we can apply the usual “distributivity of
-part to both sides of the equivalence, and on the right-hand side, we can apply the usual “distributivity of  )”, to move the
)”, to move the  and
and  are equivalent), which gives us the claimed result.
are equivalent), which gives us the claimed result. -component is well-behaved). The core idea is that this expanding and contracting strategy can be done for any truncation level of
-component is well-behaved). The core idea is that this expanding and contracting strategy can be done for any truncation level of  and
and  and
and  we used in the special case can be seen as components of a natural transformation between
we used in the special case can be seen as components of a natural transformation between ![[2]](https://s0.wp.com/latex.php?latex=%5B2%5D&bg=ffffff&fg=333333&s=0&c=20201002) -truncated semi-simplicial types. By semi-simplicial type, I mean a Reedy fibrant diagram
-truncated semi-simplicial types. By semi-simplicial type, I mean a Reedy fibrant diagram  . By
. By 
 , and its initial part is given by
, and its initial part is given by ![T \! A_{[0]} :\equiv A](https://s0.wp.com/latex.php?latex=T+%5C%21+A_%7B%5B0%5D%7D+%3A%5Cequiv+A&bg=ffffff&fg=333333&s=0&c=20201002) ,
, ![T \! A_{[1]} :\equiv A \times A](https://s0.wp.com/latex.php?latex=T+%5C%21+A_%7B%5B1%5D%7D+%3A%5Cequiv+A+%5Ctimes+A&bg=ffffff&fg=333333&s=0&c=20201002) , and
, and ![T \! A_{[2]} :\equiv A \times A \times A](https://s0.wp.com/latex.php?latex=T+%5C%21+A_%7B%5B2%5D%7D+%3A%5Cequiv+A+%5Ctimes+A+%5Ctimes+A&bg=ffffff&fg=333333&s=0&c=20201002) . If we use the “fibred” notation (i.e. give the fibres over the matching objects), this would be
. If we use the “fibred” notation (i.e. give the fibres over the matching objects), this would be ![T \! A_{[1]}(a_1,a_2) :\equiv \mathbf{1}](https://s0.wp.com/latex.php?latex=T+%5C%21+A_%7B%5B1%5D%7D%28a_1%2Ca_2%29+%3A%5Cequiv+%5Cmathbf%7B1%7D&bg=ffffff&fg=333333&s=0&c=20201002) ,
, ![T \! A_{[2]}(a_1,a_2,a_3,\_,\_,\_) :\equiv \mathbf{1}](https://s0.wp.com/latex.php?latex=T+%5C%21+A_%7B%5B2%5D%7D%28a_1%2Ca_2%2Ca_3%2C%5C_%2C%5C_%2C%5C_%29+%3A%5Cequiv+%5Cmathbf%7B1%7D&bg=ffffff&fg=333333&s=0&c=20201002) . In the terminology of simplicial sets, this is the
. In the terminology of simplicial sets, this is the ![[0]](https://s0.wp.com/latex.php?latex=%5B0%5D&bg=ffffff&fg=333333&s=0&c=20201002) -coskeleton of [the diagram that is constantly]
-coskeleton of [the diagram that is constantly]  . One potential definition for the lowest levels would be given by (I only give the fibres this time):
. One potential definition for the lowest levels would be given by (I only give the fibres this time): ![E \! B_{[0]} :\equiv B](https://s0.wp.com/latex.php?latex=E+%5C%21+B_%7B%5B0%5D%7D+%3A%5Cequiv+B&bg=ffffff&fg=333333&s=0&c=20201002) ,
, ![E \! B_{[1]}(b_1,b_2) :\equiv b_1 = b_2](https://s0.wp.com/latex.php?latex=E+%5C%21+B_%7B%5B1%5D%7D%28b_1%2Cb_2%29+%3A%5Cequiv+b_1+%3D+b_2&bg=ffffff&fg=333333&s=0&c=20201002) ,
, ![E \! B_{[2]}(b_1,b_2,b_3,p_{12},p_{23},p_{13}) :\equiv p_{12} \cdot p_{23} = p_{13}](https://s0.wp.com/latex.php?latex=E+%5C%21+B_%7B%5B2%5D%7D%28b_1%2Cb_2%2Cb_3%2Cp_%7B12%7D%2Cp_%7B23%7D%2Cp_%7B13%7D%29+%3A%5Cequiv+p_%7B12%7D+%5Ccdot+p_%7B23%7D+%3D+p_%7B13%7D&bg=ffffff&fg=333333&s=0&c=20201002) . This is a fibrant replacement of
. This is a fibrant replacement of  with objects
with objects ![[0],[1],[2]](https://s0.wp.com/latex.php?latex=%5B0%5D%2C%5B1%5D%2C%5B2%5D&bg=ffffff&fg=333333&s=0&c=20201002) ) is, it is easy to see that the
) is, it is easy to see that the ![[1]](https://s0.wp.com/latex.php?latex=%5B1%5D&bg=ffffff&fg=333333&s=0&c=20201002) -component is exactly a proof
-component is exactly a proof  , and the
, and the  . (The type of such natural transformations is given by the limit of the exponential of
. (The type of such natural transformations is given by the limit of the exponential of  and maps out of the truncation
and maps out of the truncation  , with a universal property making the modal types a reflective subcategory (or more precisely, sub-(∞,1)-category) of the category of all types. Moreover, the modal types are assumed to be closed under Σs (closure under some other type formers like Π is automatic).
, with a universal property making the modal types a reflective subcategory (or more precisely, sub-(∞,1)-category) of the category of all types. Moreover, the modal types are assumed to be closed under Σs (closure under some other type formers like Π is automatic). rather than the other way around — they are most closely analogous to the “possibility” modality of classical modal logic. But since they act on all types, not just mere-propositions, for emphasis we might call them higher modalities.
rather than the other way around — they are most closely analogous to the “possibility” modality of classical modal logic. But since they act on all types, not just mere-propositions, for emphasis we might call them higher modalities. is “constant”. Here is my preferred terminology:
is “constant”. Here is my preferred terminology: such that
such that  for all
for all  we have
we have  .
. is conditionally constant, but not constant. I don’t have a problem with that; getting definitions right often means that they behave slightly oddly on the empty set (until we get used to it). The term “weakly constant” was introduced by
is conditionally constant, but not constant. I don’t have a problem with that; getting definitions right often means that they behave slightly oddly on the empty set (until we get used to it). The term “weakly constant” was introduced by  shows the converse fails. Similarly, it’s easy to show that conditionally constant implies weakly constant. KECA showed that the converse holds if either
shows the converse fails. Similarly, it’s easy to show that conditionally constant implies weakly constant. KECA showed that the converse holds if either  , and conjectured that it fails in general. In this post I will describe a counterexample proving this conjecture.
, and conjectured that it fails in general. In this post I will describe a counterexample proving this conjecture. In the formalization, I first define a worm precategory which only allows for two-cell composition in one direction. Then, I use Lean’s inheritance mechanism to get the full notion of a double (pre)category:
In the formalization, I first define a worm precategory which only allows for two-cell composition in one direction. Then, I use Lean’s inheritance mechanism to get the full notion of a double (pre)category: of groups (or, equivalently, a totally disconnected groupoid) on the objects of
of groups (or, equivalently, a totally disconnected groupoid) on the objects of  a group homomorphism
a group homomorphism  and a groupoid action
and a groupoid action  and
and  for each
for each  , $f \in \text{hom}_P(p,q)$ and
, $f \in \text{hom}_P(p,q)$ and  .
. and
and  which establish their equivalence.
which establish their equivalence. and
and  . Here, the type of objects is the set
. Here, the type of objects is the set  is the identity type
is the identity type  , and the set of two-cells associated to four points
, and the set of two-cells associated to four points  and paths
and paths  on the top, bottom, left and right of a diagram is the set
on the top, bottom, left and right of a diagram is the set  . This could serve as the starting point to formalize a 2-dimensional Seifert-van Kampen theorem using double groupoids or crossed modules.
. This could serve as the starting point to formalize a 2-dimensional Seifert-van Kampen theorem using double groupoids or crossed modules. , a witness of idempotency
, a witness of idempotency  , and a coherence datum
, and a coherence datum  , and we use them to split
, and we use them to split  induced from the splitting agree with the given ones?
induced from the splitting agree with the given ones?
 , can we also split it with
, can we also split it with  ?
?
 agrees, but the induced
agrees, but the induced  does not in general, and (4) Yes — by splitting an idempotent! They have also been formalized; see the pull request
does not in general, and (4) Yes — by splitting an idempotent! They have also been formalized; see the pull request  says that for any
says that for any 
 I mean an element of
I mean an element of  .) Clearly we could just have applied the homotopy in the first place. Once we have a type theory in which paths in function types literally are homotopies, this won’t be a problem, but for now, it makes life easier if we can avoid introducing funext redexes in the first place.
.) Clearly we could just have applied the homotopy in the first place. Once we have a type theory in which paths in function types literally are homotopies, this won’t be a problem, but for now, it makes life easier if we can avoid introducing funext redexes in the first place.

 has a (homotopy) fiber that is an Eilenberg-MacLane space
has a (homotopy) fiber that is an Eilenberg-MacLane space  . This is easy to see from the long exact sequence. Moreover, when X is a special sort of space, such fibrations are classified by cohomology classes, according to the following theorem:
. This is easy to see from the long exact sequence. Moreover, when X is a special sort of space, such fibrations are classified by cohomology classes, according to the following theorem: has (homotopy) fibers that are all merely isomorphic to
has (homotopy) fibers that are all merely isomorphic to  , for some
, for some  and some abelian group A. Then the following are equivalent:
and some abelian group A. Then the following are equivalent: .
.
 (at all basepoints) on A is trivial.
(at all basepoints) on A is trivial.
 are called its k-invariants. Note that they live in the cohomology group
are called its k-invariants. Note that they live in the cohomology group  .
.















![[-] : B \to \| B \|](https://s0.wp.com/latex.php?latex=%5B-%5D+%3A+B+%5Cto+%5C%7C+B+%5C%7C&bg=ffffff&fg=333333&s=0&c=20201002)





![[b] = [b'].](https://s0.wp.com/latex.php?latex=%5Bb%5D+%3D+%5Bb%27%5D.&bg=ffffff&fg=333333&s=0&c=20201002)

























 is contractible, even though
is contractible, even though  might not be; hence erasure of contractible types results in full proof irrelevance, contradicting univalence. More precisely, if inhabitants of contractible types are judgmentally equal, then we can apply the second projection function to the judgmental equality
might not be; hence erasure of contractible types results in full proof irrelevance, contradicting univalence. More precisely, if inhabitants of contractible types are judgmentally equal, then we can apply the second projection function to the judgmental equality  :
:
![$$\xymatrix{ \sum\limits_{x:2} Q(i(x)) \pullbackarrow[ddr] \ar[r] \ar[dd]^-{\texttt{pr}_1} & \sum\limits_{x : I} Q(x) \ar[dd]^-{\texttt{pr}_1} \\ \\ 2 \ar@/^/[uu]^-{\texttt{myst\_pi\_i}} \ar[r]_i & I \ar@/^/[uu]^-{\texttt{myst\_sig}} }$$](https://homotopytypetheory.org/wp-content/uploads/2014/02/myst_pi_fibration_diagram.png)
 side of the picture, we have
side of the picture, we have ![$$\xymatrix{ B \ar[rr]_-g && \sum\limits_{x:B} Q(x)\ar@/_/[ll]_-{\texttt{pr}_1} \\ A \ar[rr]_-f && B \\ A \ar[rr]_-{\text{``$g\circ f$''}} && \sum\limits_{x:A}Q(f(x)) \ar@/_/[ll]_-{\texttt{pr}_1} \ar[rr] && \sum\limits_{y:B} Q(y) }$$](https://homotopytypetheory.org/wp-content/uploads/2014/02/composition_diagram.png)
![$$\xymatrix{ \text{sections of fibrations} \ar@{^{(}->}[d] \ar@{}[drr]|-{\text{\color{red}\huge\xmark}} && \text{functions}\ar[ll] \ar@{}[d]|{\rotatebox{90}{$\subseteq$}} \\ \text{morphisms of types} \ar@/^/[rr] \ar@{}[rr]|-{\cong} && \text{non-dependent functions} \ar@/^/[ll] }$$](https://homotopytypetheory.org/wp-content/uploads/2014/02/no_commute.png)
 is contractible, even when
is contractible, even when 
 , the Yoneda lemma, the cumulative hierarchy of sets, and a new constructive treatment of the real numbers — with a whole lot of new and fascinating mathematics and logic along the way. (Mike Shulman has written a blog post with a more detailed outline
, the Yoneda lemma, the cumulative hierarchy of sets, and a new constructive treatment of the real numbers — with a whole lot of new and fascinating mathematics and logic along the way. (Mike Shulman has written a blog post with a more detailed outline 

 is not a groupoid, i.e. its path-spaces are not sets, but a proof of that is already surprinsingly difficult.
is not a groupoid, i.e. its path-spaces are not sets, but a proof of that is already surprinsingly difficult.  is not an n-type. At the same time, our construction yields, for a given
is not an n-type. At the same time, our construction yields, for a given 





 we know
we know  is a set.
is a set. -set and covering spaces. Here we assume
-set and covering spaces. Here we assume  .
. , and the point
, and the point  to even make one point in the ribbon; while we can get a
to even make one point in the ribbon; while we can get a  -truncated path out of the connectedness condition, the constructor requires a
-truncated path out of the connectedness condition, the constructor requires a  with ideal computational behaviors. In our case, different points generated by different paths will be glued together by the
with ideal computational behaviors. In our case, different points generated by different paths will be glued together by the  (again) with the new library; however, even with aggressive Agda optimization, the complexity remains—one still needs to prove the contractibility of some covering of
(again) with the new library; however, even with aggressive Agda optimization, the complexity remains—one still needs to prove the contractibility of some covering of  for universality. Perhaps there are other better examples which can show the real power of this isomorphism?
for universality. Perhaps there are other better examples which can show the real power of this isomorphism?
 for all
for all  . I hope he will write it up and blog about it himself; I want to talk instead about a question regarding modalities that was raised by his talk: is every modality a higher inductive type?
. I hope he will write it up and blog about it himself; I want to talk instead about a question regarding modalities that was raised by his talk: is every modality a higher inductive type? together with a map
together with a map  in an universal way. More precisely, if i is the inclusion of n-truncated spaces into spaces, then n-truncation is left adjoint to i. (
in an universal way. More precisely, if i is the inclusion of n-truncated spaces into spaces, then n-truncation is left adjoint to i. ( inside of type theory. For some reason, I decided to use an inductive definition of each type of simplicial operators
inside of type theory. For some reason, I decided to use an inductive definition of each type of simplicial operators ![[n] \to [m]](https://s0.wp.com/latex.php?latex=%5Bn%5D+%5Cto+%5Bm%5D&bg=ffffff&fg=333333&s=0&c=20201002) , rather than defining them as order-preserving maps of finite totally ordered sets in the more common way. I’m no longer sure that that was a good choice, but in case anyone is interested to have a look, the definition is
, rather than defining them as order-preserving maps of finite totally ordered sets in the more common way. I’m no longer sure that that was a good choice, but in case anyone is interested to have a look, the definition is  in type theory corresponds to a fibration
in type theory corresponds to a fibration  in a model category. To say that each
in a model category. To say that each  is fiberwise homotopic to the identity. In this case we may say that s is a deformation section of p.
is fiberwise homotopic to the identity. In this case we may say that s is a deformation section of p. represents the “mapping path fibration” which occurs in the (acyclic cofibration, fibration) factorization of f. (This is how Gambino and Garner constructed the identity type weak factorization system.) Therefore, to say that f is a Voevodsky equivalence is equivalently to say that the fibration part of this factorization has a deformation section, as above.
represents the “mapping path fibration” which occurs in the (acyclic cofibration, fibration) factorization of f. (This is how Gambino and Garner constructed the identity type weak factorization system.) Therefore, to say that f is a Voevodsky equivalence is equivalently to say that the fibration part of this factorization has a deformation section, as above. to become fiberwise, which we can do by concatenating it with the inverse of
to become fiberwise, which we can do by concatenating it with the inverse of  . This is a degenerate case of “adjointification” when one of the homotopies is constant, but I think it is significantly simpler to understand than the general case. In particular, it avoids the confusing “play with naturality” bit (which is most comprehensible when written with string diagrams, and probably least comprehensible when written in terms that Coq can understand). It’s also the same way that the corresponding fact is proven in homotopy theory; see e.g. Prop. 7.8.2 in Hirschhorn’s book on model categories.
. This is a degenerate case of “adjointification” when one of the homotopies is constant, but I think it is significantly simpler to understand than the general case. In particular, it avoids the confusing “play with naturality” bit (which is most comprehensible when written with string diagrams, and probably least comprehensible when written in terms that Coq can understand). It’s also the same way that the corresponding fact is proven in homotopy theory; see e.g. Prop. 7.8.2 in Hirschhorn’s book on model categories.


 of
of  is equivalent to the space of all local sections at
is equivalent to the space of all local sections at 
 is an equivalence if
is an equivalence if  is an equivalence for each
is an equivalence for each  .
. for some fixed
for some fixed  to emphasize on the similarity of the role it plays to the Yoneda embedding of
to emphasize on the similarity of the role it plays to the Yoneda embedding of  . We call a transformation from
. We call a transformation from  is a path in
is a path in  defined by
defined by  . So
. So  sends for each
sends for each  to the concatenation
to the concatenation  .
. is a transformation from
is a transformation from 
 in
in  denotes transportation along
denotes transportation along  when
when  be the type
be the type  . Since
. Since  it follows that
it follows that  is inhabited by the canonical term
is inhabited by the canonical term  . The assertion follows now by the induction principle for identity types.
. The assertion follows now by the induction principle for identity types.
 . The equivalences
. The equivalences  are natural in the sense that the diagram
are natural in the sense that the diagram
 .
. for a presheaf
for a presheaf  and a natural transformation
and a natural transformation  . But as I wrote this blog post, the following short proof occured to me:
. But as I wrote this blog post, the following short proof occured to me: is inhabited, then
is inhabited, then 




 is contractible.
is contractible.  is the map
is the map  .
. , a path
, a path  and a transformation
and a transformation  , we get the term
, we get the term of
of  .
. . Induction on
. Induction on  for
for  .
. to a path from
to a path from  is itself a path from
is itself a path from 


 be the function from
be the function from  to
to  given by substitution along
given by substitution along  for
for  . We may also define the function
. We may also define the function  given by
given by
 . Then
. Then




 is contractible. What this shows is that
is contractible. What this shows is that  is equivalent to our original dependent sum when
is equivalent to our original dependent sum when  we have the equivalence
we have the equivalence






 given by
given by
 .
.




 generalizes the original dependent product construction.
generalizes the original dependent product construction.








 over
over 
 of two dependent types over
of two dependent types over  .
.
 and
and 






 to be the dependent type over
to be the dependent type over  . The correspondence
. The correspondence

 , looks pretty similar to “A is contractible”, i.e.
, looks pretty similar to “A is contractible”, i.e.  . Therefore, it is not at all surprising that a slight modification of the
. Therefore, it is not at all surprising that a slight modification of the  and a proof
and a proof  “thinks” about
“thinks” about  of nonidentity arrows. An equivalent, but better, definition is that the relation “x receives a nonidentity arrow from y” on its objects is well-founded.
of nonidentity arrows. An equivalent, but better, definition is that the relation “x receives a nonidentity arrow from y” on its objects is well-founded. is Reedy fibrant if for each
is Reedy fibrant if for each  , the map from
, the map from  to the limit of the values of
to the limit of the values of  simplicial sets is a presentation of the
simplicial sets is a presentation of the  -presheaf topos
-presheaf topos  .
. , then a diagram
, then a diagram  is Reedy fibrant if the following two conditions hold.
is Reedy fibrant if the following two conditions hold. is a fibration (i.e.
is a fibration (i.e.  is fibrant). Here 1 is the limit of the empty diagram (there being no objects below
is fibrant). Here 1 is the limit of the empty diagram (there being no objects below  )
)
 .
.

 out of a universe in
out of a universe in  that is the universal dependent type. Regarded as a dependent type in context, this fibration is
that is the universal dependent type. Regarded as a dependent type in context, this fibration is
 is a map
is a map  , where
, where  , as usual.
, as usual. is homotopy-initial if for every algebra
is homotopy-initial if for every algebra  , the type of all weak maps
, the type of all weak maps  is contractible.
is contractible. can be reduced to these; in fact, the possibility of such reductions is itself part of our investigation. There are some results in extensional type theory (cited in the paper) showing that many inductive types are reducible to W-types, and there is some literature (also cited) showing how such reductions can fail in the purely intensional theory. We show that in HoTT some of these reductions go through, provided both the W-types and the inductive types are understood in the appropriate “homotopical” way, with propositional computation rules. The detailed investigation of more such reductions is left as future work.
can be reduced to these; in fact, the possibility of such reductions is itself part of our investigation. There are some results in extensional type theory (cited in the paper) showing that many inductive types are reducible to W-types, and there is some literature (also cited) showing how such reductions can fail in the purely intensional theory. We show that in HoTT some of these reductions go through, provided both the W-types and the inductive types are understood in the appropriate “homotopical” way, with propositional computation rules. The detailed investigation of more such reductions is left as future work. ), but I haven’t checked this yet.
), but I haven’t checked this yet. is an equivalence for all
is an equivalence for all  in F. When F is small in a well-behaved category (such as a Grothendieck topos), the F-local objects are a reflective subcategory, and moreover every (accessible) reflective subcategory arises in this way.
in F. When F is small in a well-behaved category (such as a Grothendieck topos), the F-local objects are a reflective subcategory, and moreover every (accessible) reflective subcategory arises in this way. , then we ought to be able to show that the resulting left-exact-reflective subcategory of the model also supports such a model. If this works, it should simplify the search for models of univalence in
, then we ought to be able to show that the resulting left-exact-reflective subcategory of the model also supports such a model. If this works, it should simplify the search for models of univalence in  .
. ), and the direct image functor (called
), and the direct image functor (called  ) a further right adjoint (called Codisc), and moreover Disc and (equivalently) Codisc are fully faithful.
) a further right adjoint (called Codisc), and moreover Disc and (equivalently) Codisc are fully faithful. (or just
(or just  , is equivalent to the integers
, is equivalent to the integers  ). Since the integers are a set, this should imply that
). Since the integers are a set, this should imply that  as well, modulo a suitable definition of
as well, modulo a suitable definition of  , for a suitable definition of
, for a suitable definition of  , we can regard
, we can regard  as indexed by one copy of A and parametrized by the other. Then, for any fixed M:A, it is provable that any element of
as indexed by one copy of A and parametrized by the other. Then, for any fixed M:A, it is provable that any element of  must be of the form
must be of the form 